Today nothing industry/model related, but still a lot of fun for me - Hello Internet podcast, done by Brady Haran and CGP Grey. Take a minute to listen (first ones are shorter than one hour), and see if you like them. I enjoy both works of Brady (Numberphile channel) and CGP - a lot of fun videos. And podcast seems to be great - I'm at episode 7 now.
http://www.hellointernet.fm/
Best,
K.

Wednesday, September 27, 2017
Wednesday, September 20, 2017
Chromehounds - do you remember?
In 2006, Sega released 3 paper models for Mecha from game Chromehounds. It's not easily to find, since original website is down, and re-uploads are gone, but wayback machine has saved the page, so you can get it, at least for some time.
What I found interesting, is the design of these mecha - not standard 2-legged walkers, but something more fun. I haven't assembled them yet, but they are waiting on my to-do list. I also find it amusing that instead of "Heavy weight", these robots are "Heavy wait" - so you cannot make them fast, I suppose:)
Grab them: Link



Best,
K.
What I found interesting, is the design of these mecha - not standard 2-legged walkers, but something more fun. I haven't assembled them yet, but they are waiting on my to-do list. I also find it amusing that instead of "Heavy weight", these robots are "Heavy wait" - so you cannot make them fast, I suppose:)
Grab them: Link



Best,
K.
Monday, September 18, 2017
Important step done - flats finally finished
I have finished links 4, 5 and 6. As usual, small geometry mistakes slipped in, but it turned out fine. In general, it's ready for print and test assembly, but currently I do not have workshop for models set up - so test assembly will have to wait a little bit. Anyway, plans for now are to print flats at sensible scale, in few copies - one for assembly, one for making notes what has to be fixed, and couple as spares for making changes on the fly. I think (but not decided yet) that I'll export all flats to .svg and start coloring, in the meantime making test build and all changes, which then will be incorporated into .svg. I do not know how it will turn out, so for next model maybe I'll do full test build and changes before export. We'll see.


Future plans - I do not feel like making another small robot for now, and since my modelmaking capacity is low, I will start some more complicated 3D model - ABB-IRB2400, full sized, low payload handler.
Best,
K.


Future plans - I do not feel like making another small robot for now, and since my modelmaking capacity is low, I will start some more complicated 3D model - ABB-IRB2400, full sized, low payload handler.
Best,
K.
Friday, September 15, 2017
2 and 3 done for now
Links 2 and 3 are flat now. Couple of geometry issues had to be fixed, but nothing really major, so it went rather nicely. I still haven decided how many lines will be left on parts - for sure guide lines for other part, and most probably all lines where surface is broken - either on bending line, or on line where curve starts, which then I would have to check in print - probably light grey, as thin as possible to avoid visually breaking model. Maybe I'll skip some of them for clarity - we'll see. Anyway - work is progressing quite nice, but in awful hours - almost everything I do is done way too late for me to comfortably sleep, but I do not want to skip any update. In 3 or 4 weeks I should have more civilized time for working, so it should get better.
Below are links 2 and 3, flat and draft instructions.




Best,
K.
Below are links 2 and 3, flat and draft instructions.



Best,
K.
Wednesday, September 13, 2017
Flying probe tester
Check it out - flying probe testers for PCB - I haven't seen them in real lifer, but they are awesome.
Best,
K.
Best,
K.
Monday, September 11, 2017
And works goes on
Link 1 is flat. Some mistakes in grouping were found, and fixed. Also, there is something finicky in way that Sketchup makes surfaces, and on flats I want to have specific surfaces to easily manipulate shapes, and also to make nice pictures - to post something. Right now it's not decided yet how exactly I will proceed further, but it seems that I'll keep flattening links until the end.
You might notice a lot of parts are 1mm - this serves two purposes. One, it let.s me get away with small geometry which is flat - some parts just need to be that thick. Other purpose is to have something to glue on, when joining two pieces at 90-ish degree, but where tabs are not feasible - on arc especially. Hopefully test run will explain it better.
General remark - updates are rather smaller than I initially intended for two reasons. One - I have a off-work project going on, which is consuming nearly all of my time, and second one is making content in advance - I have couple of posts (not enough in my opinion) scheduled in advance, so even if I have some days when I cannot do any work, I will still keep with update schedule. When situation get's better, and I'll have more time, and content made in advance in sufficient quality and quantity - updates might get bigger if work is going on fine. Hopefully it's ok for all of you.


Best,
K.
You might notice a lot of parts are 1mm - this serves two purposes. One, it let.s me get away with small geometry which is flat - some parts just need to be that thick. Other purpose is to have something to glue on, when joining two pieces at 90-ish degree, but where tabs are not feasible - on arc especially. Hopefully test run will explain it better.
General remark - updates are rather smaller than I initially intended for two reasons. One - I have a off-work project going on, which is consuming nearly all of my time, and second one is making content in advance - I have couple of posts (not enough in my opinion) scheduled in advance, so even if I have some days when I cannot do any work, I will still keep with update schedule. When situation get's better, and I'll have more time, and content made in advance in sufficient quality and quantity - updates might get bigger if work is going on fine. Hopefully it's ok for all of you.

Best,
K.
Friday, September 8, 2017
Mistakes were made
So I made couple of mistakes, which today I tried to repair. What was the problem:
1. Base was not grouped properly - in flats file it's already done, in main file with 3D model it will be eventually fixed, but I do not have a lot of time, so I'll skip it for now.
2. When I made flats, I did not include intersection lines. In the end, they will help a lot during coloring/assembly, so I re-did whole base to have them
3. I did not left anything from 3D the model - right now you can see that I kept exploded view of base, which will be used in the future for instruction images - my idea is to have instructions as graphical as possible, so language will not be a barrier.
This is how it looks now - all elements will be included in flats file.


Best,
K.
1. Base was not grouped properly - in flats file it's already done, in main file with 3D model it will be eventually fixed, but I do not have a lot of time, so I'll skip it for now.
2. When I made flats, I did not include intersection lines. In the end, they will help a lot during coloring/assembly, so I re-did whole base to have them
3. I did not left anything from 3D the model - right now you can see that I kept exploded view of base, which will be used in the future for instruction images - my idea is to have instructions as graphical as possible, so language will not be a barrier.
This is how it looks now - all elements will be included in flats file.



Best,
K.
Wednesday, September 6, 2017
Nuclear power plant model
I stumbled upon this nice model (unfortunately I think you cannot purchase it anywhere) couple of years ago, and now I found it again. Take look at pictures (Page 5 from Konradus forum), or go to the first page to see whole build in progress. Even if this model is not available, it was super fun to watch photos of it being built.
Model itself presents nuclear power plant, from Olkiluoto in Finland, and was made by Kemot (Tomasz Grzybowski).


Best,
K.
Model itself presents nuclear power plant, from Olkiluoto in Finland, and was made by Kemot (Tomasz Grzybowski).


Best,
K.
Monday, September 4, 2017
GitHub
Sometimes, instead of update from work in progress, I will post updates to GitHub repos. If I will have enough posts in advance, I might double post on that days, but for now I'm hardly catching up with schedule, so GitHub update gives me some breathing room.
Anyway - started GitHub repositories, with first being for ABB IRB120:
https://github.com/IndustrialPapercraft/ABB-IRB120
My plan is to have each model in separate repository, and for now I'll upload 3D model made in Sketchup, flats from Sketchup, probably .svg after coloring/painting, and finished pdfs. For most purposed pdf will be enough, but just in case someone wants to check my 3D/flat models, they'll be available, and I think GitHub will be better that blog to put these files on.
Best,
K.
Anyway - started GitHub repositories, with first being for ABB IRB120:
https://github.com/IndustrialPapercraft/ABB-IRB120
My plan is to have each model in separate repository, and for now I'll upload 3D model made in Sketchup, flats from Sketchup, probably .svg after coloring/painting, and finished pdfs. For most purposed pdf will be enough, but just in case someone wants to check my 3D/flat models, they'll be available, and I think GitHub will be better that blog to put these files on.
Best,
K.
Friday, September 1, 2017
Pancakes
Started flattening already. Plugin which I'm using is sometimes finicky, but it gets the job done, so I'll stick to it. Flattening should be straightforward, but time consuming - unfortunately I cannot do anything about this. After everything is flat, I'll do painting/test assembly, most likely in parallel, so I can adjust non-white elements accordingly, especially if position will matter.

This is only the base. Decided to split cylinder to 3 parts, as this generally makes cleaner assembly afterward. Some parts would be impossible to assembly as small boxes with 1mm height, so it's better to put them on 1mm cardboard and then to cut them. In test run I'll try 0,5 cardboard also, as this might look cleaner.
Best,
K.

This is only the base. Decided to split cylinder to 3 parts, as this generally makes cleaner assembly afterward. Some parts would be impossible to assembly as small boxes with 1mm height, so it's better to put them on 1mm cardboard and then to cut them. In test run I'll try 0,5 cardboard also, as this might look cleaner.
Best,
K.
Wednesday, August 30, 2017
How fast you can move your balls?
Adept Cobra, from Omron, is advertised as fastest Scara robot on the market. I do not know if it's the fastest, but it's fast as hell. Watch it here: Adept Cobra. If it not fun for you to watch, then I don't know what might be.
Maybe in the future I'll make a model of this (or other) small Scara robot - to have model of something fast. I will also make model of giant handlers - to have something big. I'll see what will be more fun.
Best,
K.
Maybe in the future I'll make a model of this (or other) small Scara robot - to have model of something fast. I will also make model of giant handlers - to have something big. I'll see what will be more fun.
Best,
K.
Monday, August 28, 2017
3D checked and finished
3D model is finished. I assembled all links together, and measured distances where parts match together - found one place where I was off by 1mm (in 1:1, so negligible on model). I fixed it anyway. I'm quite satisfied with the look of finished model. In total I would estimate it took 10 hours of work, not including writing posts on blog, which took another 5 or so.
Is it similar enough?

Next time - first flattening.
Best,
K.
Is it similar enough?

Next time - first flattening.
Best,
K.
Friday, August 25, 2017
Model ready
3D model in Sketchup is finished. It is still not perfect, and it has to be checked and corrected where necessary, but it's ready. In next step I will put all links together, and measure all distances between links - to confirm that after assembling each link separately, you can still join them together. Anyway, I'm pretty happy at this point - I was not sure if I can finish this task, and if I will find time to write something about it on a blog - but it seems that it's not so hard if I'll have the time - which is always the biggest bottleneck.
Finished links:

Best,
K.
Finished links:

Best,
K.
Wednesday, August 23, 2017
Aliens, anyone?
If you are interested in paper craft and paper models, you have to check http://aliens.humlak.cz/. Site is old, and not updated, but still contains great models from Jan Rukr. Or check the new page from Jan, which seems to be up to date - http://www.alienspapercraft.com/. Lot of fun models, some hard, and some harder, but they seem to be of quite good quality. Unfortunately I haven't assembled any of them, but they are for sure on my wish list.


Go visit, leave a nice comment, and assemble some good models.
Best,
K.


Go visit, leave a nice comment, and assemble some good models.
Best,
K.
Monday, August 21, 2017
4/2 != 2
Small progress, but still something. link 4 almost done, - just copy, rotate and flange to connect with link 3. But it's not finished yet, so small update. I skipped part of geometry, which i think will be hard to flatten, and even harder to assemble. It might happen that this part (area where link 5 rotates) will have to be changed, but that will be known after link 5 is completed.


Best,
K.
Friday, August 18, 2017
Links, 2, 3...
Links 2 and 3 are ready. Link two was tricky due to change of thickness - sides are wider on bottom, and due to additional part on top - it has to bend accordingly, otherwise there will be mismatch in assembly. Link 3 was even harder to get proper geometry - but in the end it turned out nicely. I had to drop two small cutouts, as on model they would be 1,5mm x 2mm, which way to small to assemble properly (at least I do not like such small cutouts). Overall I'm pretty happy with the look of model and with the progress which has been made. I expected a lot more problems with keeping up to the schedule, especially since now I have quite a lot of work.

Images of all pieces done, and assembled with .step model for comparison. I think it is similar enough to recognize that this model is IRB120 :)
Something to listen.
Best,
K.

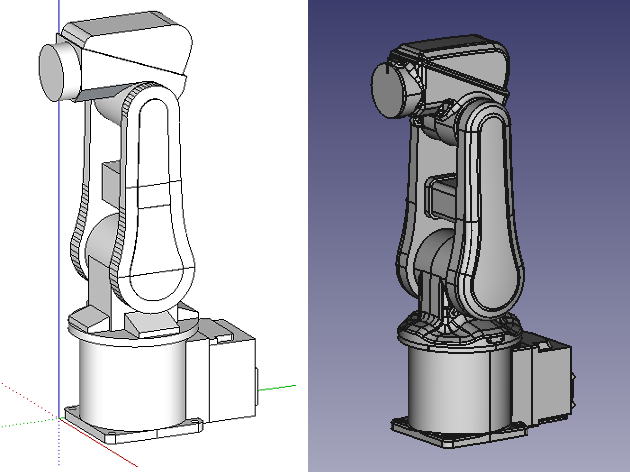
Images of all pieces done, and assembled with .step model for comparison. I think it is similar enough to recognize that this model is IRB120 :)
Something to listen.
Best,
K.
Wednesday, August 16, 2017
Highlight - Boston Dynamics
If you're interested in robots - and I'm sure you are, if you're reading this blog, then you have to know what Boston Dynamics is doing. I had no idea that there is company making fun robots - not the ones doing hard work, but the ones that can do fun stuff. Check out Spot robot - four legged robot, running on batteries, which can walk. Seems like pretty mundane task, perfected by nature through millenia of evolution, which is hard to replicate with robots - and somehow these guys can get it done. See for yourself:
Best,
K.
Best,
K.
Monday, August 14, 2017
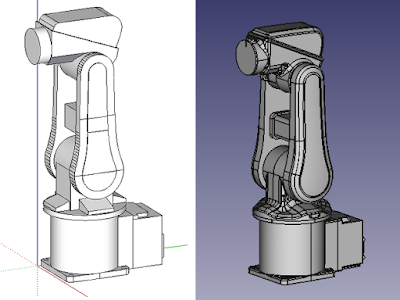
Link one done, not much else...
Extremely busy days result in not much work done. Fortunately, still some progress can be made - first link of IRB120 was finished. Small parts are the result, but I think it will be possible to assemble - test run will show it. Next links are planned, and starting from link 4 it would be faster, and less parts as result.
Anyway, this is first link, hopefully all relevant geometry is kept - remember, 70mm.model, so pieces are around 1-2mm in smallest areas.

Best,
K.
Anyway, this is first link, hopefully all relevant geometry is kept - remember, 70mm.model, so pieces are around 1-2mm in smallest areas.

Best,
K.
Friday, August 11, 2017
All your base...
First small update. IRB120 started, software operational, all systems ok. Generally, I'll stick to 1:10 for now, which is super tiny for small robots - we'll see when we'll be at large handlers. For now, due to extremely limited time (I have max one hour per day) I have to find time to make models, write posts, prepare images etc., so work will be progressing slowly. But that's also ok, if I do not stop - plan is to spend at least half an hour every day to work on blog.
What have I done - base of IRB120. Basically 1/7th of model. Currently at 5 part, only 2 requiring assembly, 3 have to be cut and glued into place. I have no idea how it will look all white, but I hope it will be ok.

Here you can see what I've done. On left .step model of robot base, on right Sketchup model of model. It might not look impressive, but in total it is 20x20x50 millimeters, so it's tiny, tiny. It took me about an hour or so, mostly to get measurements right, and I had to redo part of it due to stupid mistake when making groups in Sketchup. Basically, each part is separate group, which automatically clones touching faces between two parts, which will come in handy during assembly. I will try to finish axis 1 and 2 until Monday, but we'll see if I will find required time.
Best,
K.
What have I done - base of IRB120. Basically 1/7th of model. Currently at 5 part, only 2 requiring assembly, 3 have to be cut and glued into place. I have no idea how it will look all white, but I hope it will be ok.
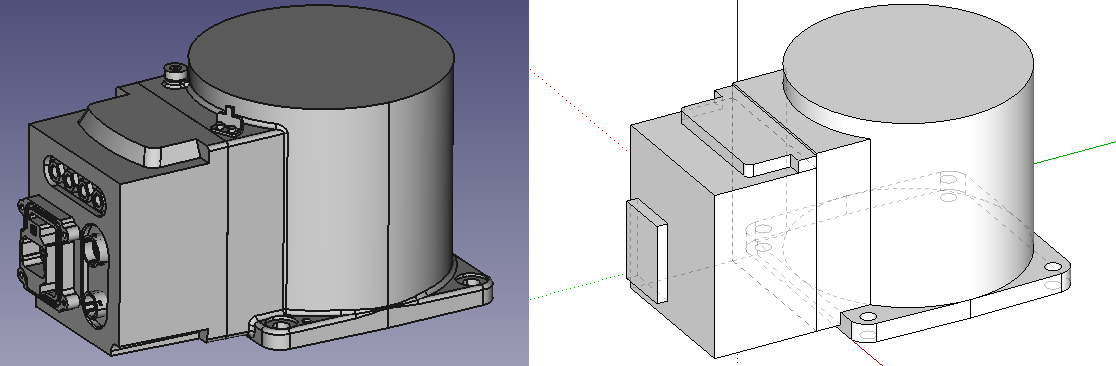
Here you can see what I've done. On left .step model of robot base, on right Sketchup model of model. It might not look impressive, but in total it is 20x20x50 millimeters, so it's tiny, tiny. It took me about an hour or so, mostly to get measurements right, and I had to redo part of it due to stupid mistake when making groups in Sketchup. Basically, each part is separate group, which automatically clones touching faces between two parts, which will come in handy during assembly. I will try to finish axis 1 and 2 until Monday, but we'll see if I will find required time.
Best,
K.
Wednesday, August 9, 2017
Design considerations
Today on Wednesday I'll explain couple of other things which I have to take into consideration with my projects. Not all of them are critical and have to be addressed now, but I'll try to explain them anyway.
2. Small brothers. I decided that additionally to 1:10 robot, each one will be also available in simpler form, in 1:25 scale. That way small model can be given away, or kept in the office without much hassle.
1. Scale. 3D models are made 1:1 scale, already simplified. That way I am still able to measure and check critical dimensions, as they should be more or less the same on my 3D and on reference model, but having them already simplified will make whole process faster. I still haven't decided when I will scale them down - probably during sheets assembly, so all coloring will be done with full sized drawings. Target scale for models will be between 1:8 and 1:10 - I would rather do 1:8 to have bigger models and less details, so they will be actually doable, but if scaling is done as last step, I can always change it later on. Target is to have decent sized models of small robots (small robots have ~80cm, so 1:10 will give around 8cm model), and manageable sizes of big stuff (big ones are 4m in size, which makes massive 40cm model).
2. Small brothers. I decided that additionally to 1:10 robot, each one will be also available in simpler form, in 1:25 scale. That way small model can be given away, or kept in the office without much hassle.
3. Test assembly. For each model, before coloring step, I will make test assembly to check if dimensions are right - if something folds up nicely on screen, it doesn't mean it will fold up with real paper. Test assembly will be done without color, using other materials (especially glue) than normal models - test process doesn't have to be pretty, but it has to be fast.
4. Coloring. Will be done at the end, and I do not expect much problems - robots are generally mono colored anyway. Coloring at the end will allow me to check on test assembly if there are some areas where color changes have to be preserved across parts.
4. Coloring. Will be done at the end, and I do not expect much problems - robots are generally mono colored anyway. Coloring at the end will allow me to check on test assembly if there are some areas where color changes have to be preserved across parts.
5. First model. Decided to make ABB's IRB 120 - smallest one. For couple of reasons actually - it will be simpler, faster and easier to make, and for sure I will mess something up - then it will be easier to rework in the future. Or maybe not, we'll see. Anyway, I do not know how long it will take me to make this model - right now I'm pretty busy, but in the end I want to get it done fast - it's always easy to start project, it's always hard to finish it properly. And .step files are available from ABB website. Second one - Mitsubishi RV-4, also tiny one - probably the smallest one I can make in 1:10 scale, with 250mm arms, so 25mm on model.
6. Upload. All models will be available on this blog in .pdf format, and I also plan to start github site just for finished models - it will be easier to find them. Of course, I know that there are probably less than five people interested in robots papercraft, but who knows - maybe someone will find it useful. For sure I will find it fun.
Best,
K.
Best,
K.
Monday, August 7, 2017
Software for crazy projects
What software I'm using, to make a paper model:
1. Getting resources. Since I'll be making industrial robots paper models, it's quite easy - the best option is to get 3D drawing from manufacturer, in some sensible format - usually .step files are available to download. If not, then lot of photos where scale is kept or even measuring real life example is required. Since I'm able to get .step files, I will use FreeCAD (I'll try to put links to all software at the bottom of relevant posts), which looks like very nice tool, and it has measurements available, which is required. Other than that we do not need any features, so I'll not cover them.
2. Drawing in 3D. To make paper model, first I need to create 3D model. I decided to use SketchUp 8, as this is the version I'm familiar with. I know that I have FreeCAD available, but I do not want to start learning another program, which is much more complicated that it needs to be. Sketchup seems to have just enough features for model making, and is really easy to use, so I'll stick with that.
3. Flattening. After creating 3D model of a model, I need to flatten it, as it has to be printed out. Several tools are available, out of which I choose Flattery plugin for Sketchup. It has some quirks, but in general I found it simplest and fastest tool, even though it sometimes requires a lot of clicking, as it cannot unfold shapes by itself. Additionally it allows for re-joining of faces, which is quite handy.
4. Coloring and assembling sheets - this has not been decided yet. Gimp or Inkscape are my two first options - I've heard a lot of good things about Inkscape, and I'm familiar with Gimp, so I'll have to choose one. But this is a decision which has to be done later, so I don't worry about this very much.
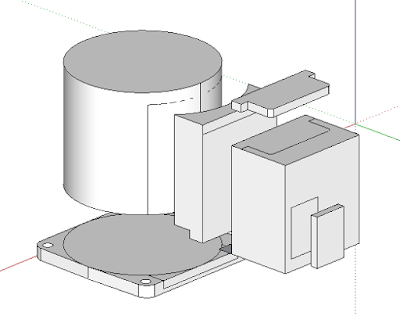
Just as a test, and as an excuse to put some images into post, I tried to make simple model in Sketchup to see how it goes, and to remember how I should use it - I haven't done anything serious in couple of years now. For added fun - 5 minutes time limit on drawing. Ready, set, go.
Here's the result:

1. Getting resources. Since I'll be making industrial robots paper models, it's quite easy - the best option is to get 3D drawing from manufacturer, in some sensible format - usually .step files are available to download. If not, then lot of photos where scale is kept or even measuring real life example is required. Since I'm able to get .step files, I will use FreeCAD (I'll try to put links to all software at the bottom of relevant posts), which looks like very nice tool, and it has measurements available, which is required. Other than that we do not need any features, so I'll not cover them.
2. Drawing in 3D. To make paper model, first I need to create 3D model. I decided to use SketchUp 8, as this is the version I'm familiar with. I know that I have FreeCAD available, but I do not want to start learning another program, which is much more complicated that it needs to be. Sketchup seems to have just enough features for model making, and is really easy to use, so I'll stick with that.
3. Flattening. After creating 3D model of a model, I need to flatten it, as it has to be printed out. Several tools are available, out of which I choose Flattery plugin for Sketchup. It has some quirks, but in general I found it simplest and fastest tool, even though it sometimes requires a lot of clicking, as it cannot unfold shapes by itself. Additionally it allows for re-joining of faces, which is quite handy.
4. Coloring and assembling sheets - this has not been decided yet. Gimp or Inkscape are my two first options - I've heard a lot of good things about Inkscape, and I'm familiar with Gimp, so I'll have to choose one. But this is a decision which has to be done later, so I don't worry about this very much.
Just as a test, and as an excuse to put some images into post, I tried to make simple model in Sketchup to see how it goes, and to remember how I should use it - I haven't done anything serious in couple of years now. For added fun - 5 minutes time limit on drawing. Ready, set, go.
Here's the result:

Not bad for a 5 minute run on midnight. Anyway, nothing more today, so this has to be enough. For Friday small update planned - should have basics of model outlined, at least that is the target.
Best,
K.
Sunday, August 6, 2017
Update schedule
It's not the first time I start a blog. I hope it's the first time that I will keep updating regularly, for longer that two weeks. My experience tells me that having schedule will help me, as it will require me to put stuff up - my personal target is to have 2 weeks of content prepared up front, so in case of disaster I can still catch up. So, current schedule:
Monday - major report from work currently in progress - design, test assembly, finishing or upload of model
Wednesday - highlights of fun models - not necessarily industrial stuff, but I'll try to keep it far from military stuff as I can. Or robot stuff - there's so much fun and amazing robots out there, it's worth sharing. If not highlight, then I'll post anything which I find interesting - my be you'll like it too.
Friday - small update of work in progress, or any other ranting related to my projects - no idea of I can make anything done during week.
Depending on how it works out, I'll adjust it as needed. Anyway, this means that tomorrow first large post of work in progress should be done - but I haven't started anything:) In that case I will list software which I'm using - maybe someone will find it interesting.
Monday - major report from work currently in progress - design, test assembly, finishing or upload of model
Wednesday - highlights of fun models - not necessarily industrial stuff, but I'll try to keep it far from military stuff as I can. Or robot stuff - there's so much fun and amazing robots out there, it's worth sharing. If not highlight, then I'll post anything which I find interesting - my be you'll like it too.
Friday - small update of work in progress, or any other ranting related to my projects - no idea of I can make anything done during week.
Depending on how it works out, I'll adjust it as needed. Anyway, this means that tomorrow first large post of work in progress should be done - but I haven't started anything:) In that case I will list software which I'm using - maybe someone will find it interesting.
Saturday, August 5, 2017
Beginnings
Couple of years ago idea popped to my mind - maybe I could create paper model from scratch - create 3D model, simplify it, flatten, color it properly, lay out sheets, all in hope that it can be turned into model. At that time I was doing some drawings in SketchUp - seemed that it would be suitable for this task, and easy enough that I would not have to spend two years learning it.
At the same time I switched my work - instead of working with machines from 70s, I started in highly automated enviroment with up to date technology. My jaw dropped when I first saw fully automatic line, with huge (that's what I thought at the time) robots handling parts without human supervision.
Somehow these two topics clicked and connected - maybe I could make paper model of industrial robot? The biggest problem was that I did not had any source material, and making models from pictures only is possible, but is doomed to be innacurrate. But this was years ago. Now I have what I need, so the only thing stopping me is myself.
Of course, I have no idea how to make such model, and I'm not the best model maker either. So it will be very challenging, yet I think it can be done and for sure I'll have a lot of fun making it.
At the same time I switched my work - instead of working with machines from 70s, I started in highly automated enviroment with up to date technology. My jaw dropped when I first saw fully automatic line, with huge (that's what I thought at the time) robots handling parts without human supervision.
Somehow these two topics clicked and connected - maybe I could make paper model of industrial robot? The biggest problem was that I did not had any source material, and making models from pictures only is possible, but is doomed to be innacurrate. But this was years ago. Now I have what I need, so the only thing stopping me is myself.
Of course, I have no idea how to make such model, and I'm not the best model maker either. So it will be very challenging, yet I think it can be done and for sure I'll have a lot of fun making it.
Subscribe to:
Posts (Atom)